
Модели
Спецификация
Характеристики лазерного триангуляционного 2-D датчика LS2D
| ХАРАКТЕРИСТИКИ ИЗМЕРЕНИЯ | |
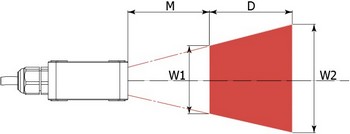
| Диапазон измерений, D, мм | от 1 до 3000 |
| Ближняя граница, M, мм | от 0 до 4000 |
| Ширина сканирующего луча на ближней границе, W1, мм | от 4,5 до 2000 |
| Ширина сканирующего луча на дальней границе W2, мм | от 9 до 2000 |
| Дискретность для сканеров с диапазонами измерений, мм: | |
| от 1 до 3 мм | 0,00006 |
| от 3 до 7 мм | 0,0001 |
| от 7 до 15 мм | 0,0002 |
| от 15 до 120 мм | 0,002 |
| от 120 до 500 мм | 0,008 |
| от 500 до 1000 мм | 0,016 |
| от 1000 до 3000 мм | 0,06 |
| Предел относительной погрешности, приведённой к диапазону измерений, %: | 0,1 % |
| ЦИФРОВОЙ ИНТЕРФЕЙС | |
| Интерфейс цифровой | Ethernet 10/100 Мбит/с, два дискретных программируемых выхода с опторазвязкой1 |
| Вход синхронизации | логический уровень 5–24 В срабатывание по переднему фронту |
| РАБОЧИЕ ХАРАКТЕРИСТИКИ | |
| Номинальное постоянное напряжение питания, В | 5 — 40 |
| Потребляемая мощность, не более, Вт |
4 |
| Диапазон рабочих температур, °С | от 10 до 35 |
| Время выхода на рабочий режим, мин, не более | 5 |
| Время непрерывной работы | не ограничено |
| ГАБАРИТЫ И КОРПУС | |
| Вес, кг, не более | 0,17 (корпус типа S) |
| 0,4 (корпус типа А) | |
| 0,43 (корпус типа B) | |
| 0,5 (корпус типа BA) | |
| 3 (корпус типа C) | |
| Габаритные размеры, мм, не более | 65×45×30 (корпус типа S) |
| 90×90×30 (корпус типа А) | |
| 130×60×30 (корпус типа B) | |
| 170×90×30 (корпус типа BA) | |
| L×110×45 (корпус типа C) | |
| Материал корпуса | сталь, алюминий |
1 Наличие программируемых выходов позволяет на базе одного сканера создать систему, выдающую сигналы управления на исполнительные механизмы. Программирование осуществляется с помощью программного обеспечения, поставляемого со сканером.
Принцип работы
Принцип работы LS2D – лазерного триангуляционного 2-D датчика
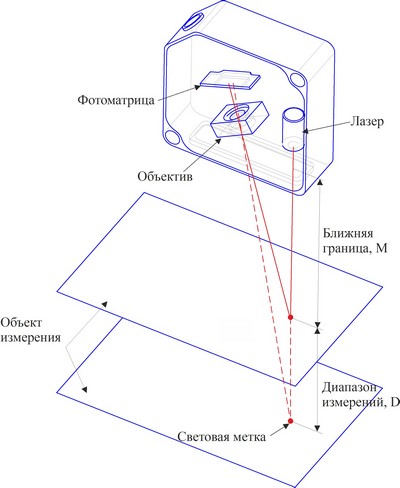
Излучённый лазером луч, развернутый в идеальную прямую линию, проецируется на поверхность контролируемого объекта.
Световая линия повторяет форму профиля объекта в сечении. Отраженное от объекта изображение световой линии посредством объектива проецируется на КМОП-фотоматрицу. По координатам изображения на фотоприемнике микропроцессор производит вычисление реальных координат световой линии.
Результаты измерений сканера посредством интерфейса Ethernet передаются на компьютер.
Для получения трехмерной модели формы или поверхности объекта можно использовать перемещение датчика LS2D с учетом точной величины этого перемещения.
В зависимости от поставленной задачи в сканерах, помимо красных, применяются синие лазеры. Применение таких лазеров позволяет использовать сканеры при сильных засветках с большим преобладанием красного спектра (сварка, дневной свет и т.п.). Использование в одной системе сканеров с разной длиной волны позволяет устранить взаимное влияние датчиков друг на друга.
Сканеры могут оснащаться системами обдува окон и воздушного (или водяного) охлаждения. Система обдува окон используется для снятия пыли и других загрязнений с поверхности защитных стёкол. Система водяного/воздушного охлаждения применяется для увеличения рабочего диапазона температур сканера.
Бинокулярные сканеры модели LS2DB представляют собой два сканера, выполненные в одном корпусе (см. рисунок 1). Отраженный от объекта 1 лазерный луч проецируется сразу на две фотоматрицы 2. По информации, полученной с этих фотоматриц, микропроцессор производит вычисление расстояния до объекта.
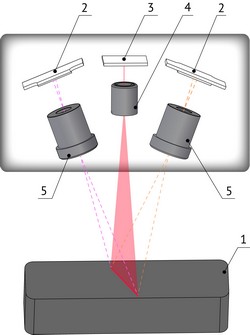
Рисунок 1 — Устройство бинокулярного сканера LS2DB: 1 — контролируемая поверхность; 2 — КМОП-фотоматрица; 3 — плата лазера; 4 — объектив лазера; 5 — объектив фотоматрицы
Применение бинокулярных сканеров повышает точность измерений глубоких объектов и поверхностей со сложным рельефом (см. рисунок 2).
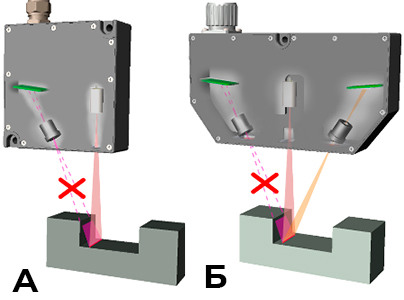
Рисунок 2 — Сравнение результатов измерения обычным лазерным сканером (а) и бинокулярным (б)
При измерении подобных объектов обычным триангуляционным лазерным сканером (см. рисунок 2, а) возможно наличие зон затемнения, в которых отраженное от объекта излучение не попадает на фотоприемник прибора. В бинокулярных сканерах (см. рисунок 2, б) зоны затемнения отсутствуют, что позволяет более детально провести измерения.
Применение
Сканер LS2D, предназначенный для работы со сварочными роботами.
Отличительные особенности:
- Качественная гальваническая развязка от питания;
- Двойной электромагнитный экран (повышенная помехоустойчивость);
- Бленда для защиты от засветки при сварке;
- Встроенное водяное охлаждение;
- Встроенный обдув;
- Быстросменные защитные окна.
Типовые примеры использования LS2D – лазерного триангуляционного 2-D датчика
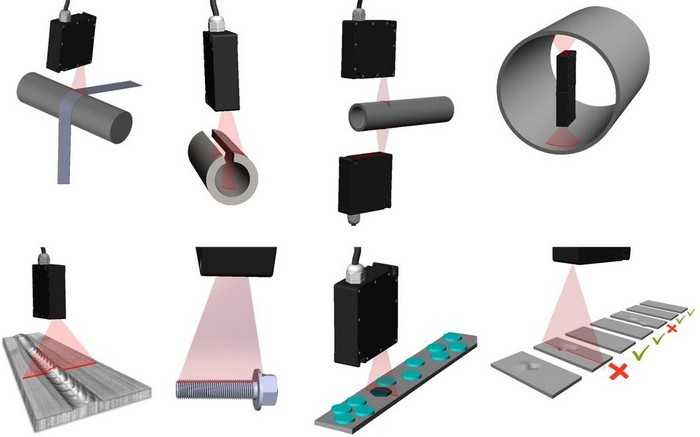
Измерение профиля поверхности одним сканером (движущаяся полоса продукции, протяжённые тела, тела вращения) позволяет определять: параметры разнотолщинности в продольном и поперечном направлении, кромку полосы, локальные дефекты, биения, отклонения профиля от нужной геометрии, внутренний и наружный диаметры, качество сварных швов, параметры резьбы и т. д. Для получения полной или частичной трехмерной модели объекта нужно использовать скорость движения объекта, заданную фиксировано или измеряемую динамически.
Непрерывный контроль продукции позволяет непосредственно управлять техническим процессом. Например, можно сортировать изделия, идущие по конвейеру, или динамически корректировать толщину экструзионных изделий, или учитывать объём сыпучих материалов, движущихся на транспортёрной ленте.
Создание 3-D модели с использованием одного или двух сканеров одновременно позволяет полностью контролировать все допуски, осуществлять поиск и контроль характерных мест (отверстий, щелей, валов), измерять межосевые углы и расстояния и все другие параметры, которые очень сложно или практически невозможно точно контролировать другими механическими средствами измерения.
Для заказа
Информация для заказа LS2D – лазерного триангуляционного 2-D датчика
Лазерные триангуляционные датчики LS2D характеризуются ближней границей диапазона М, диапазоном измерения по дальности D, шириной в начале (W1) и в конце (W2) диапазона. Эти параметры лежат в основе обозначения датчиков при заказе.
При заказе сканера следует придерживаться обозначения:
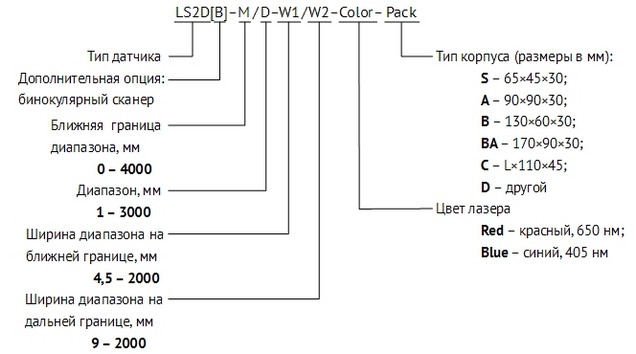
Пример условного обозначения:
LS2D-150/50-30/40-Red-A
| Расшифровка | |
| сканер лазерный LS2D | |
| ближняя граница диапазона, мм | 150 |
| диапазон, мм | 50 |
| ширина диапазона на ближней границе, мм | 30 |
| ширина диапазона на дальней границе, мм | 40 |
| цвет лазера | красный, 650 нм |
| тип корпуса | 90×90×30 |
Перечень обычно применяемых сканеров (стандартные диапазоны)
В миллиметрах
| Модель LS2D- |
Ближняя граница диапазона, М | Диапазон измерений, D | Конец диапазона, (D+M) | Ширина в начале диапазона, W1 | Ширина в конце диапазона, W2 | Тип корпуса |
| 12/5-6,5/8 | 12 | 5 | 17 | 6,5 | 8 | LS2D-A |
| 40(-10)/5-5/6 | 40 (-10)1 | 5 | 45 | 5 | 6 | |
| 30(-10)/10-10/13 | 30 (-10) | 10 | 40 | 10 | 13 | |
| 60(-15)/10-11/12 | 60 (-15) | 10 | 70 | 11 | 12 | |
| 50(-15)/20-17/22 | 50 (-15) | 20 | 70 | 17 | 22 | |
| 90(-15)/20-15/19 | 90 (-15) | 20 | 110 | 15 | 19 | |
| 85(-15)/50-27/42 | 85 (-15) | 50 | 135 | 27 | 42 | |
| 125(-15)/50-22/32 | 125 (-15) | 50 | 175 | 22 | 32 | |
| 120(-15)/100-36/66 | 120 (-15) | 100 | 220 | 36 | 66 | |
| 170(-15)/100-30/50 | 170 (-15) | 100 | 270 | 30 | 50 | |
| 150(-15)/200-46/109 | 150 (-15) | 200 | 350 | 46 | 109 | |
| 220(-15)/200-41/80 | 220 (-15) | 200 | 420 | 41 | 80 | |
| 180(-15)/400-54/175 | 180 (-15) | 400 | 580 | 54 | 175 | |
| 280(-15)/400-52/130 | 280 (-15) | 400 | 680 | 52 | 130 | |
| 30/20-14/21 | 30 | 20 | 50 | 14 | 21 | LS2D-S |
| 30/35-16/25 | 30 | 35 | 65 | 16 | 25 | |
| 50/50-22/41 | 50 | 50 | 100 | 22 | 41 | |
| 70/100-29/69 | 70 | 100 | 170 | 29 | 69 | |
| 85/150-35/95 | 85 | 150 | 235 | 35 | 95 | |
| 150/100-85/122 | 150 | 100 | 250 | 85 | 122 | LS2D-B |
| 200/100-43/61 | 200 | 100 | 300 | 43 | 61 | |
| 200/200-103/180 | 200 | 200 | 400 | 103 | 180 | |
| 300/200-62/100 | 300 | 200 | 500 | 62 | 100 | |
| 250/300-122/240 | 250 | 300 | 550 | 122 | 240 | |
| 350/300-71/130 | 350 | 300 | 650 | 71 | 130 | |
| 250/400-124/278 | 250 | 400 | 650 | 124 | 278 | |
| 400/400-83/160 | 400 | 400 | 800 | 83 | 160 | |
| 300/500-144/340 | 300 | 500 | 800 | 144 | 340 | |
| 400/500-81/178 | 400 | 500 | 900 | 81 | 178 | |
| 400/500-190/390, L=300 | 400 | 500 | 900 | 190 | 390 | LS2D-C |
| 650/1000-300/685, L=400 | 650 | 1000 | 1650 | 300 | 685 | |
| 900/1500-420/1000, L=500 | 900 | 1500 | 2400 | 420 | 1000 | |
| 1100/2000-485/1260, L=600 | 1100 | 2000 | 3100 | 485 | 1260 | |
| 1350/2500-600/1600, L=650 | 1350 | 2500 | 3850 | 600 | 1600 | |
| 1600/3000-700/1900, L=760 | 1600 | 3000 | 4600 | 700 | 1900 |
1Число в скобках показывает, что при заказе значение ближней границы может быть уменьшено на величину, приведенную в скобках.
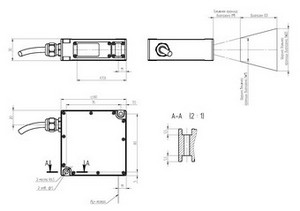
Варианты корпусов
| LS2D-A Диапазон измерений: 5 — 500 мм |
|
|
|
скачать 3-D модель
|
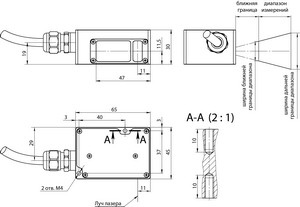
| LS2D-S Диапазон измерений: 20 — 150 мм |
|
 |
скачать 3-D модель
|
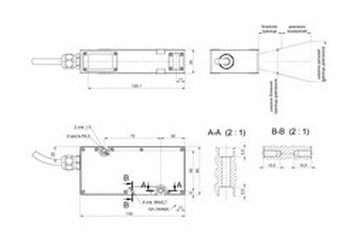
| LS2D-B Диапазон измерений: 100 — 500 мм |
|
|
|
|
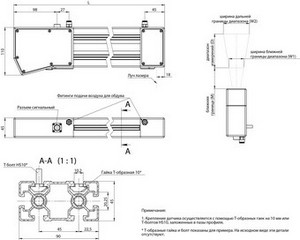
| LS2D-С Диапазон измерений: 500 — 3000 мм |
|
 |
|
| LS2DB-BA (бинокулярный) Диапазон измерений: 5 — 500 мм |
|
 |
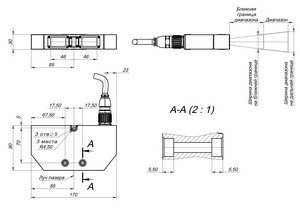 |